Radar Detector based on Transformer
TransRAD: Retentive Vision Transformer for enhanced 3D radar object detection
Overview
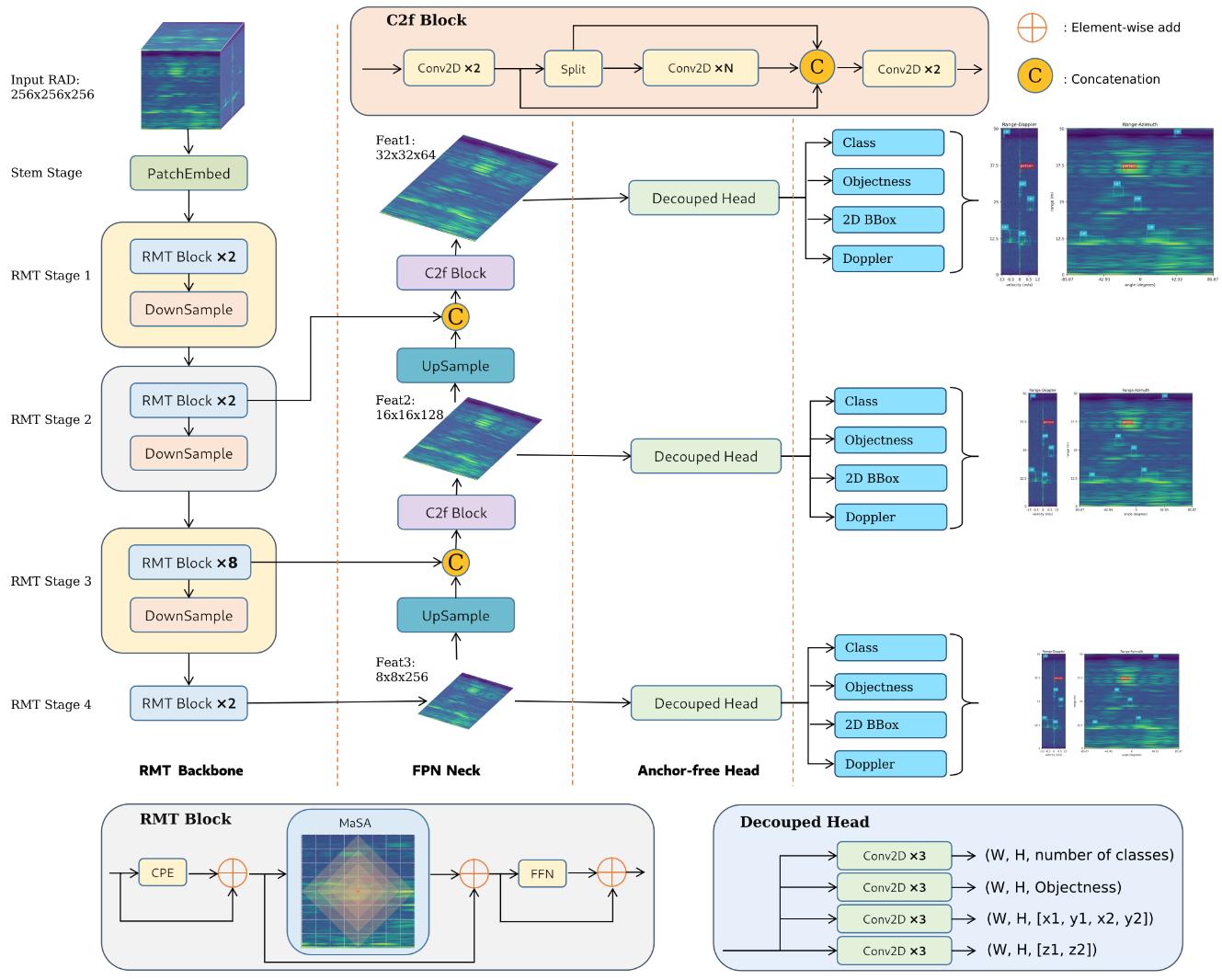
Despite significant advancements in environment perception capabilities for autonomous driving and intelligent robotics, cameras and LiDARs remain notoriously unreliable in low-light conditions and adverse weather. Radar serves as a reliable and low-cost sensor that can effectively complement these limitations. TransRAD is a 3D radar object detection model designed to address these challenges by leveraging the Retentive Vision Transformer (RMT) to learn features from information-dense radar Range-Azimuth-Doppler (RAD) data. The approach leverages the Retentive Manhattan Self-Attention (MaSA) mechanism to achieve precise 3D radar detection across Range-Azimuth-Doppler dimensions.
Key Highlights
- Autonomous Driving
- Intelligent Robotics
- Object Detection
- Transformer Architecture
- Low-Light Conditions
Methodology
Retentive Vision Transformer architecture with Manhattan Self-Attention mechanism for radar RAD feature learning. Location-Aware Non-Maximum Suppression for improved detection accuracy.
Technologies
Project Details
- Start Date
- January 2023
- End Date
- August 2025
- Status
- Completed
Resources
Related Publications
L. Cheng, S. Cao
IEEE Transactions on Radar Systems, 2025
View Paper