Object Tracking via Multimodal Sensor System - Tri-Kalman Approach
Robust tracking using tri-Kalman filters and decision-level sensor fusion
Overview
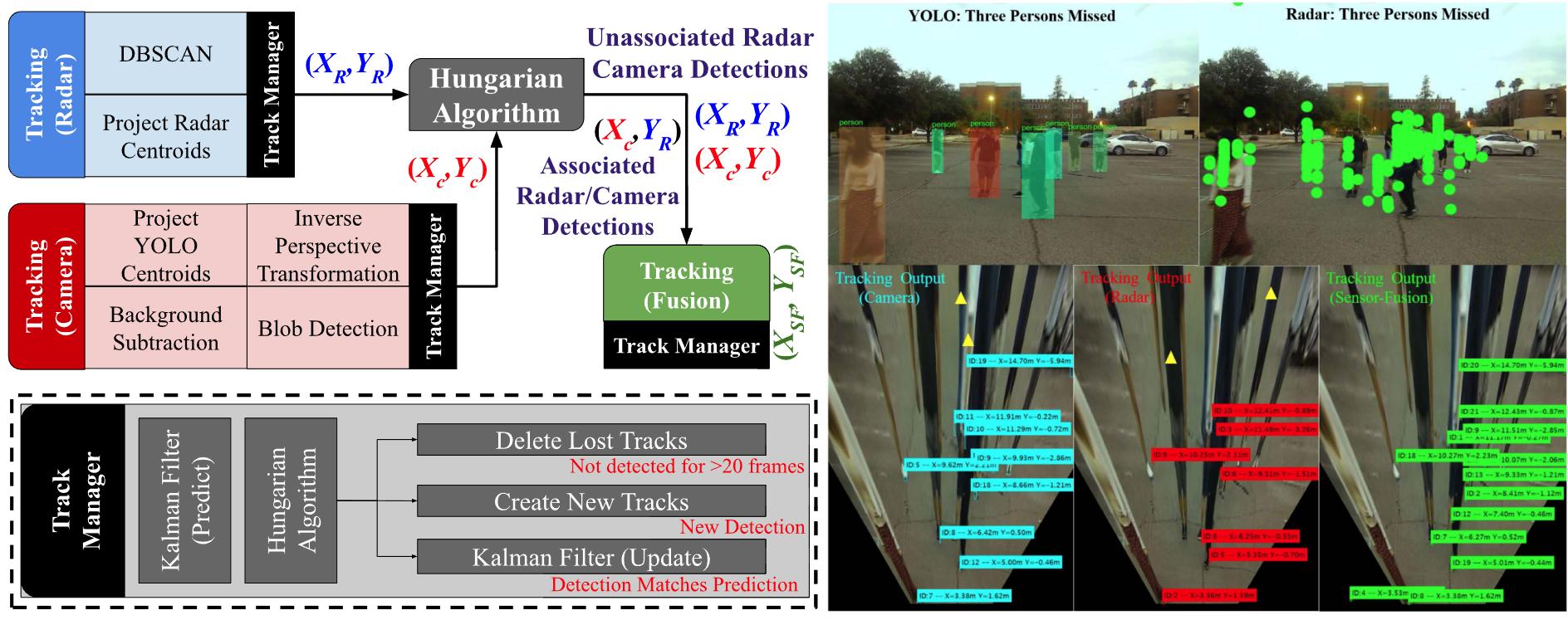
With the recent hike in the autonomous and automotive industries, sensor-fusion based perception has garnered significant attention for multi-object classification and tracking applications. This project presents a robust tracking framework using high-level monocular-camera and millimeter wave radar sensor-fusion. The method aims to improve localization accuracy by leveraging radar's depth and camera's cross-range resolutions using decision-level sensor fusion, and make the system robust by continuously tracking objects despite single sensor failures using a tri-Kalman filter setup. The approach offers promising MOTA and MOTP metrics with significantly low missed detection rates.
Key Highlights
- Sensor Fusion
- Robust Tracking
- Tri-Kalman Filter
- Decision-Level Fusion
- Low Missed Detection
Methodology
Decision-level sensor fusion using tri-Kalman filter framework. Camera intrinsic calibration for bird's-eye view estimation. Hungarian Algorithm for measurement association.
Technologies
Project Details
- Start Date
- September 2020
- End Date
- April 2022
- Status
- Completed
Resources
Related Publications
A. Sengupta, L. Cheng, S. Cao
IEEE Sensors Letters, 2022
View PaperA. Sengupta, F. Jin, S. Cao
IEEE National Aerospace and Electronics Conference (NAECON), 2019
View PaperR. Zhang, S. Cao
IEEE Access, 2019
View PaperR. Zhang, S. Cao
53rd Asilomar Conference on Signals, Systems and Computers, 2019
View Paper