Multimodal Sensor Calibration - Target based
Flexible extrinsic calibration using corner reflector with PnP/RANSAC/LM optimization
Overview
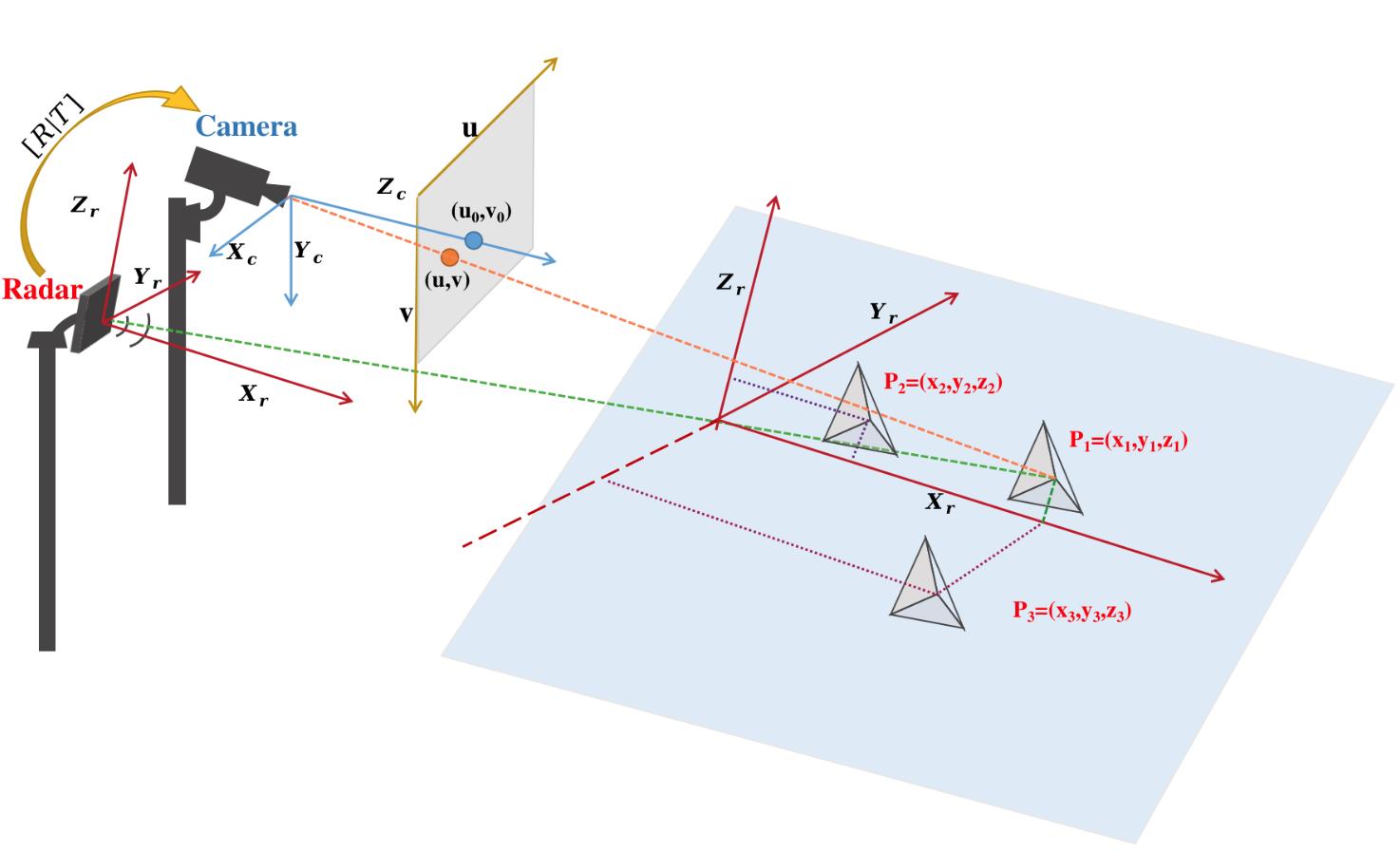
Advances in autonomous driving are inseparable from sensor fusion. Heterogeneous sensors are widely used for sensor fusion due to their complementary properties, with radar and camera being the most equipped sensors. To address the challenges of cumbersome operating procedures and well-designed experimental conditions, we propose a flexible, easy-to-reproduce and accurate method for extrinsic calibration of 3D radar and camera. The method places a single corner reflector (CR) on the ground to iteratively collect radar and camera data, obtain radar-camera point correspondences, solve the perspective-n-point (PnP) problem, and get the extrinsic calibration matrix using RANSAC and Levenberg-Marquardt optimization.
Key Highlights
- Autonomous Driving
- Sensor Fusion
- Extrinsic Calibration
- Flexible Method
- High Accuracy
Methodology
Corner reflector target detection and PnP problem solving with RANSAC for outlier rejection and Levenberg-Marquardt optimization for parameter refinement.
Technologies
Project Details
- Start Date
- September 2022
- End Date
- April 2023
- Status
- Completed
Resources
Related Publications
L. Cheng, A. Sengupta, S. Cao
IEEE Radar Conference, 2023
View Paper