Human Pose Estimation
mmPose-FK: dynamic forward kinematics with deep learning for stable radar-based pose tracking
Overview
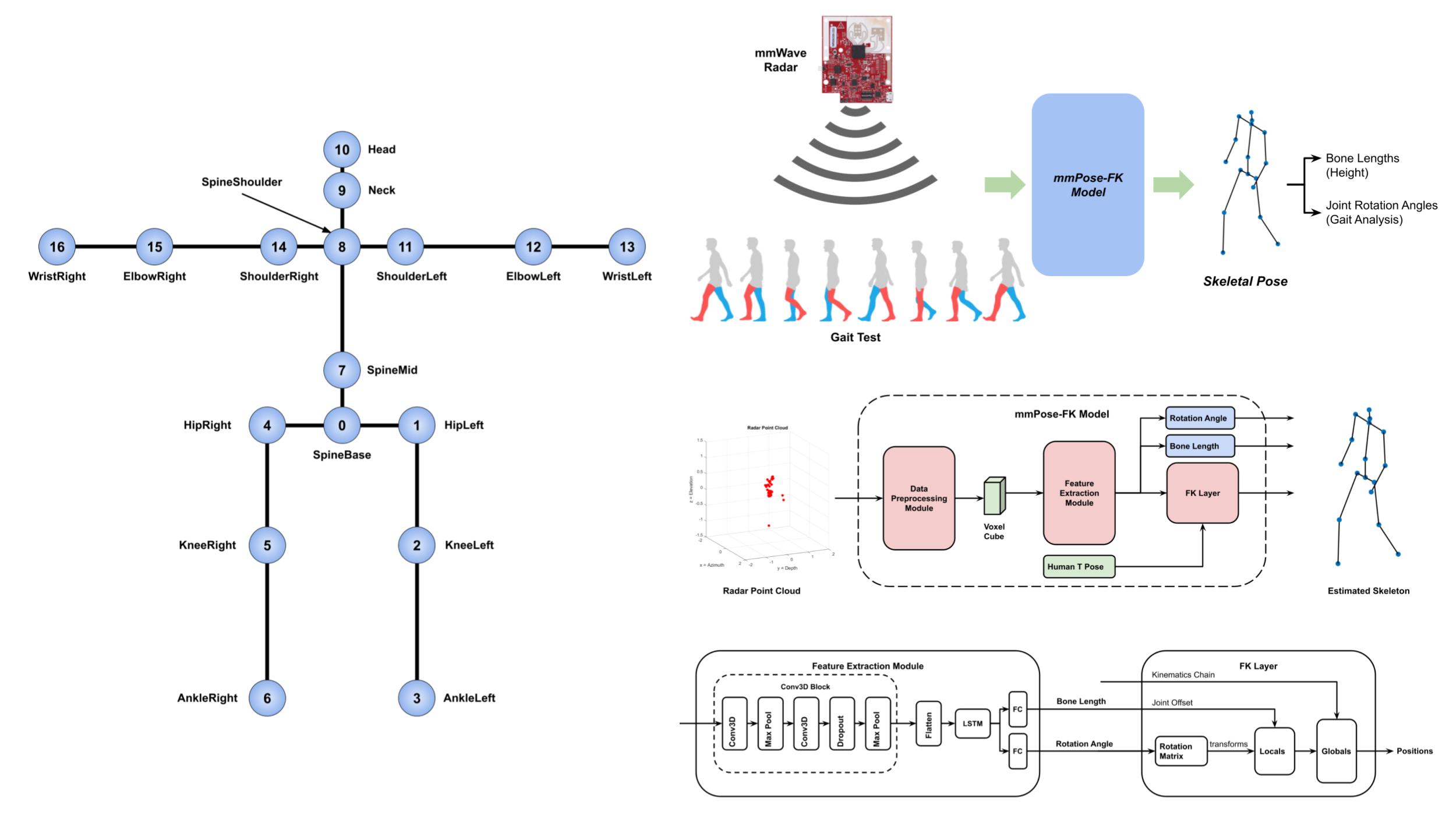
To enhance human pose estimation capabilities, we proposed mmPose-FK, a novel mmWave radar-based pose estimation method that utilizes a dynamic forward kinematics (FK) approach. This method is designed to overcome the challenges of low resolution, specularity, and noise artifacts common to mmWave radars, which often result in unstable joint poses. By integrating FK into a deep learning model, mmPose-FK provides more stable and accurate pose estimation, improving the reliability of radar-based human skeletal tracking.
Key Highlights
- Healthcare Monitoring
- Sports Analysis
- Human-Computer Interaction
- Rehabilitation
- Skeletal Tracking
Methodology
Dynamic Forward Kinematics (FK) combined with deep neural networks for joint stability. Training on noisy, low-resolution radar signatures to achieve robust pose estimation across diverse environments and lighting conditions.
Technologies
Project Details
- Start Date
- September 2018
- Status
- Active
Resources
Related Publications
S. Hu, S. Cao, N. Toosizadeh, J. Barton, M. G. Hector, M. J. Fain
IEEE Sensors Journal, 2024
View PaperA. Sengupta, S. Cao
IEEE Transactions on Neural Networks and Learning Systems, 2023
View PaperS. Hu, A. Sengupta, S. Cao
IEEE-EMBS International Conference on Biomedical and Health Informatics (BHI), 2022
View PaperA. Sengupta, F. Jin, R. Zhang, S. Cao
IEEE Sensors Journal, 2020
View PaperA. Sengupta, F. Jin, S. Cao
IEEE Radar Conference, 2020
View Paper